
Por Gorka L Martínez Mezo
En agosto de 1945 la flota de los EEUU (US Navy) disponía de una gran flota de grandes submarinos oceánicos (popularmente conocidos como «submarinos de flota» o Fleet submarines en inglés) que había sido capaces de poner de rodillas al Imperio Japonés mediante una intensa campaña de guerra submarina contra el comercio a cambios de unas escasas bajas propias. Los modelos más modernos eran los de las clases Gato y las mejoradas Balao y Tench, equipadas con cascos de presión más espesos y que podían operar a mayores profundidades.

Ilustración 1: USS BALAO (SS-285) en su configuración de guerra. Es de notar su potente armamento artillero, incluyendo dos cañones Bofors 40/60.
Sin embargo, para esa fecha esa potente flota submarina estaba totalmente obsoleta, habiendo quedado anticuada debido a los avances ocurridos en el diseño de sumergibles y en las tácticas y equipos de guerra antisubmarina desarrollados por los propios Aliados durante la guerra. La respuesta alemana a los avances técnicos y tácticos aliados fue el desarrollo de nuevos diseños que eliminaran en lo posible los vulnerables periodos en superficie para recargar las baterías y lograr igualmente mejoras dinámicas en inmersión, logrando una mayor autonomía, velocidad y maniobrabilidad conservando o mejorando las cotas operativas. Si bien estos desarrollos tuvieron resultados exóticos y poco prácticos para la tecnología de la época, dieron fruto en una nave más convencional y apta para la construcción en masa. Esta nueva nave, futuro dolor de cabeza en los albores de la Guerra Fría fue el submarino Tipo XXI que, si bien llegó a fabricarse en cantidades notables, no llegó a probar su valía en combate.
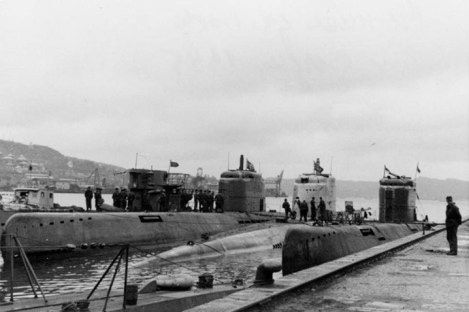
Ilustración 2: Tres submarinos Tipo XXI en Bergen (Noruega), capturados por fuerzas aliadas. Compárese su cuidado diseño hidrodinámico en comparación con el BALAO en la imagen anterior (Vía Wikipedia)
Nace el submarino rápido
La flota submarina norteamericana había logrado lo que la Kriegsmarine alemana no fue capaz de hacer contra los aliados occidentales. La vigorosa campaña antisubmarina librada por Gran Bretaña y, más tarde, los EEUU contra la flota submarina alemana la había neutralizado de manera efectiva para 1943. La respuesta alemana consistió en el desarrollo de nuevas tecnologías que hicieran al submarino competitivo de nuevo. De esta forma rápidamente se desarrolló un elemento creado en Holanda antes de la guerra, el esnorkel, que permitió a los sumergibles alemanes operar sus motores diésel en inmersión limitando su vulnerabilidad.
Sin embargo, estaba claro que era necesario algo mejor. El esnorkel permitía navegar y recargar las baterías en inmersión a baja velocidad, con unas condiciones penosas para sus tripulantes y al submarino prácticamente ciego y sordo sin mejorar nada su velocidad táctica, neutralizándolo como arma ofensiva.
Alemania llevaba años experimentando con un sistema de propulsión submarina de ciclo cerrado desarrollado por el profesor Helmut Walther basado en el empleo de peróxido de hidrógeno como oxidante. Este sistema parecía muy prometedor, pero la tecnología básica estaba lejos de estar lo bastante desarrollada como para permitir su empleo operativo. Al tiempo que se desarrollaba la nueva planta propulsora los diseñadores alemanes se dedicaron a desarrollar nuevos perfiles hidrodinámicos que permitieran a un futuro submarino equipado con la nueva planta motriz aprovecharla al máximo para lograr una gran velocidad y maniobrabilidad en inmersión. Estos estudios fueron aprovechados para diseñar una nave intermedia entre el clásico submarino de preguerra y la revolucionaria nave de Walther.
Para 1943 el diseño básico de un submarino oceánico Walther, el denominado Tipo XVIII, estaba prácticamente concluido y desde el propio equipo de desarrollo se propuso el adaptar el diseño a una planta diésel-eléctrica convencional más potente y con mucha mayor capacidad de batería. El proyecto fue aprobado por el propio Grossadmiral Doenitz y la propuesta fue preparada en un tiempo record y presentada en junio de 1943, siendo el nuevo modelo conocido como Tipo XXI.
El Tipo XXI se caracterizaba por un nuevo diseño hidrodinámico optimizado para operar sumergido, estando dotado igualmente de potentes motores eléctricos que permitían velocidades en inmersión de hasta 17 nudos. Su casco de presión tenía forma de ocho, estando dedicado el elemento inferior a albergar un gran número de acumuladores eléctricos. Su gran capacidad de batería además le daba una elevada autonomía, ayudada por la presencia de dos pequeños motores eléctricos de crucero para operar de manera silenciosa a bajas velocidades. Para las travesías largas y para recargar las baterías disponía de un esnorkel de forma que no necesitaba salir a la superficie en ningún momento, permitiendo este una velocidad de seis nudos.
Para operar de forma adecuada este nuevo diseño requería un conjunto de equipos y sensores que le permitieran operar aprovechando sus capacidades de navegación en inmersión. Por vez primera se diseñaba un submarino capaz de detectar, seguir y atacar blancos sin usar el periscopio o haciendo un uso mínimo del mismo. Además de radar, el Tipo XXI disponía de una excelente capacidad de escucha submarina. Su principal sensor era la red hidrofónica pasiva de baja frecuencia GHG (Gruppen Horsch Gerät) que podía lograr excelentes alcances en aguas abiertas contra objetivos extremadamente ruidosos como un convoy. Sin embargo, por su propia naturaleza no daba datos de distancia y su precisión en demora era limitada, de forma que disponía de un S-Gerät, equipo activo que daría la distancia en el momento de iniciar el ataque para poder lanzar con la mayor precisión torpedos convencionales no guiados del tipo FAT y LUT o torpedos con guía pasiva como el T-5 Zaukoning. Las mejoras hidrodinámicas disminuyeron igualmente su firma sonora respecto a los diseños convencionales de la época.

Ilustración 3: El U-3008 fue uno de los Tipo XXI puestos en servicio por la US Navy y estudidiados en profundidad. Vía Wikipedia.
Nuevos sensores
Los nuevos avances en el diseño y construcción de naves submarinas debían pues ser acompañados por un desarrollo equivalente de armas y sensores que permitieran a los nuevos submarinos explotar sus mejoras.
El periodo de postguerra comenzó con un espectacular desarrollo del sonar pasivo, después de que el sonar activo reinara durante la guerra.
El uso del esnorkel se acompañó de un efecto no deseado: un submarino dando esnorkel era mucho más ruidoso que otro propulsado por sus diesel pero en superficie. En el primer caso todo el ruido generado por los motores era trasmitido a las aguas colindantes, mientras que en el segundo caso sólo parte del ruido y vibraciones lo era, siendo además un componente más importante que la tradicional cavitación de las hélices. Por tanto, los torpedos acústicos pasivos existentes no tenían problemas para ser atraídos por este tipo de blancos, no requiriendo además realizar complejas maniobras en tres dimensiones. Igualmente, un sonar pensado para detectar buques de superficie se prestaba perfectamente a detectar submarinos dando esnorkel. Estas dos observaciones fueron la base del desarrollo del componente ASW basado en submarinos de postguerra. Los submarinos norteamericanos permanecerían al acecho frente a las bases soviéticas y en las rutas de entrada y salida a las mismas y cazarían a los submarinos hostiles mientras iban y venían de sus zonas de patrulla dando esnorkel, la única manera de lograr una velocidad de tránsito aceptable, usando sus torpedos acústicos pasivos.

Ilustración 4: El U-3008 con su mástil snorkel desplegado. Pueden verse los cambios realizados en el diseño de la vela, así como la presencia de un nuevo radar. US Navy vía Wikipedia
Sin embargo, una vez alcanzada la zona de patrulla, el submarino hostil apenas necesitaría dar esnorkel, convirtiéndose en un objetivo mucho más silencioso y, por tanto, más difícil de detectar y empeñar. Además, operaría con libertad en aguas profundas obligando a que cualquier torpedo que pretendiera cazarlo dispusiera de algún tipo de sonar activo de forma que pudiera perseguirlo durante sus más que esperables maniobras evasivas.
En 1945 los victoriosos submarinos norteamericanos estaban optimizados para la lucha contra buques de superficie, estando sus sensores adaptados a este tipo de tácticas. El submarino operaría fundamentalmente en superficie y detectaría a sus blancos mediante radar, medidas electrónicas (ESM) o visualmente, sumergiéndose poco antes de proceder al ataque tras haber alcanzado una posición ventajosa merced a su relativa gran velocidad en superficie.
Una vez sumergido dependería por un lado de las observaciones realizadas a través del periscopio y por otro lado de sus equipos acústicos. Estos estaban pues diseñados para realizar el seguimiento de un blanco detectado por otros medios y su alcance y precisión era limitado.
El elemento activo estándar en esta época era el WFA, un sonar de haz estrecho y alta frecuencia con un alcance instrumentado de poco más de 3500m.
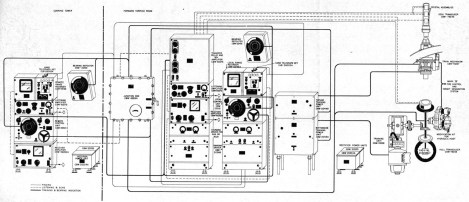
Ilustración 5: diagrama esquemático de una instalación WFA-1 (maritime.org)
El elemento pasivo era el JT, una red hidrofónica direccional de unos dos metros de base y baja frecuencia. Ambos equipos se caracterizaban por disponer de la capacidad de hacer el seguimiento de un blanco de forma automática.
Ilustración 6: diagrama de una instalación JT típica (usspampito.org)

Ilustración 7: hidrófono JT del USS Pampanito (SS-383), conservado en el Fisherman’s Wharf de San Francisco (via Wikipedia.de)
Pese a sus limitaciones, debieron servir hasta que se desarrollaron nuevos equipos sónicos y fueron mejorados para crear el BQS-3 y el BQR-3 respectivamente. Este último consistía fundamentalmente en un JT alojado en un domo hidrodinámico que permitía su empleo a mayores velocidades, estando originalmente limitado aun máximo de siete nudos, más que adecuado para naves que apenas rozaban los 10 nudos en inmersión en la mayoría de los casos.
Los trabajos de investigación y desarrollo en acústica submarina de la inmediata postguerra se basaron en los estudios y realizaciones alemanas durante la guerra, siendo su sonar pasivo GHG el «padre» de la primera generación de sonares norteamericanos pasivos de postguerra. Ya durante la guerra GHG capturados y probados tanto por británicos como norteamericanos habían demostrado su superioridad sobre sus propios equipos logrando alcances muy por encimas de los logrados por los WFA o JT. La versión definitiva del GHG montado en la roda de los Tipo VII más modernos y los Tipo XXI (Balkon) tenían una prestaciones fenomenales para la época, con alcances de más de 10.000 yardas. El GHG del U-2513 fue montado en 1949 a bordo del Guppy II USS Cochino y sirvió de base para el desarrollo de nuevos sonares pasivos. La tecnología básica del GHG fue igualmente adoptada por Francia y la Unión Soviética, mientras que fue igualmente la base para los desarrollos alemanes una vez se autorizó la construcción de submarinos en los años 50.

Ilustración 8: Balkon Gerät de un Tipo XXIII. Obsérvese el gran tamaño de la instalación.
A finales de la Segunda Guerra Mundial la USN puso en servicio otro equipo revolucionario, el sonar activo panorámico QHB. Hasta entonces todos los equipos activos eran del tipo direccional, emitiendo energía sonora en forma de estrechos haces. Este sistema obligaba a emitir un ping y esperar a su eco y eso junto a lo estrecho del haz hacía que las tareas de búsqueda fueran lentas y tediosas. Además daba la posibilidad de escapar antes de que el barrido del sonar alcanzara la posición a un submarino lo bastante alejado y alertado por los pings emitidos por el equipo durante la fase de búsqueda. Mayor potencia para alcances superiores sólo aumentaba el problema, enlenteciendo aún más la fase de búsqueda. El QHB seguía operando a las altas frecuencias propias de la guerra (logrando una buena resolución pero escaso alcance) pero lo hacía emitiendo un ping omnidireccional, encargándose un conmutador moviéndose a 300rpm dentro de una red cilíndrica de varios hidrófonos de detectar cualquier eco. Esto limitaba el alcance debido a que sólo se captaba una fracción del eco en una dirección dada, pero hacía que las tareas de búsqueda fueran mucho más rápidas. Si bien fue diseñado para buques de superficie (en España fue un equipo muy común en los años 50 y 60 debido a que se instaló en muchas unidades modernizadas con la ayuda de los EEUU), suponía una gran mejora sobre el WFA y muchos Guppy montaron este o sus variantes mejoradas BQS-2, SQS-10 o SQS-11. En algunos casos su instalación se acompañaba de un equipo direccional WFA/BQS-3, aunque estos desaparecieron una vez el diseño fue modificado con la incorporación de conmutadores que permitían emitir de forma direccional.
Este tipo de sonares tenían otra ventaja: al no ser necesario apuntarlos hacia el blanco podían ser fijados a la estructura y eso a su vez permitía que su tamaño fuera mayor. Este aumento de tamaño permitía aperturas mayores, el uso de menores frecuencias y mayores alcances. Por ejemplo, el SQS-4 desarrollo a partir del QHB, operaba a mitad de frecuencia que este y lograba alcances dobles, siendo mayores en equipos que operaban a frecuencias aún menores.
La versión norteamericana del GHG fue el BQR-2, cuyo elemento receptor estaba formado por 48 elementos colocados en un círculo de casi 2m de diámetro y operaba en un margen de frecuencias de 150Hz a 15kHz. Disponía de capacidad de seguimiento automático de un blanco y posteriormente se le añadió un registrador demora-tiempo BTR-1, consistente en un rollo de papel que se movía a una velocidad constante sobre el que se marcaban las señales que alcanzaban una intensidad determinada, obteniéndose así una representación gráfica de los movimientos del blanco, permitiendo obtener datos sobre la posición del mismo de forma pasiva. Este fue probado con éxito en 1952 y rápidamente incorporado como BQR-2B. El desarrollo del grabador tiempo-demora fue la base de la llamada TMA (Target Motion Análisis, análisis del movimiento del blanco) que permite calcular una solución de tiro pasiva usando los movimientos del blanco en relación con los propios para calcular su velocidad, rumbo y finalmente distancia. También se ensayó su uso como receptor de las señales emitidas por un elemento activo denominado BQS-4 que se alojaba dentro de la red hidrofónica del BQR-2, siendo introducido el conjunto como BQR-2C a partir de 1959. Muchos BQR-2B recibieron igualmente el BQS-4. La última versión basada en el uso de una memoria digital y una computadora para formar la formación de haces fue la BQR-2E.

Ilustración 9: el submarino museo USS Torsk durante una varada de mantenimiento en 2011, mostrando su BQR-2 bajo la proa (http://usstorsk.org/photoalbum/2011ddk/2011ddk000.htm)

Ilustración 10: consolas del BRQ-2B y BQS-4 del USS Cusk (SS-348) vía usscusk.com
Una versión de mayor diámetro, denominada BQR-4, fue específicamente diseñada para submarinos ASW. Tenía 58 elementos hidrofónicos y operaba en la banda de 150Hz a 5kHz obteniendo alcances mucho mayores, de hasta 50nm en condiciones ideales, contra submarinos dando esnorkel. Inicialmente sólo era capaz de operar en modo audio, aunque posteriormente se le añadió un grabador demora-tiempo. Igualmente carecía de capacidad de seguimiento automático, por lo que solía complementarse con un BQR-3.

Ilustración 11: USS Piper (SS-405). El gran domo a proa aloja su red cilíndrica BQR-4A mientras que el domo más pequeño sobre cubierta aloja un BQR-3 (via Wikipedia)
PUFFS
Una de las limitaciones fundamentales del sonar pasivo es que es incapaz de dar distancias. La USN ensayó distintos métodos para lograr obtener distancias exactas de forma pasiva. Uno de los métodos ensayados fue la triangulación, usando la longitud del submarino como línea de base a lo largo de la que se instaban varios hidrófonos de forma que a base de las demoras obtenidas se pudiera calcular por triangulación la posición del blanco. Si bien fue ensayada con éxito (como JX), este sistema fue superado por un método alternativo basado en la correlación de la salida de parejas de hidrófonos para detectar de forma precisa la dirección de una onda sonora incidente. Este sistema fue desarrollado como PUFFS (Passive Underwater Fire Control Feasibility Study). Si la distancia era lo bastante elevada como para no poder triangular la posición, daba de manera exacta de demora para obtener una solución pasiva vía TMA. Entró en servicio en 1961 y BQG-4 fue instalado en los Guppy III logrando calcular distancias y demoras con un error del 5% y 0,1º respectivamente con un alcance de hasta 20.000yds en condiciones ideales.

Ilustración 12: USS Greenfish (SS-351)en una imagen tomada en la década de los 60. Las «aletas de tiburón» de la cubierta alojan los hidrófonos del sistema BQG-4 PUFFS. USN photo vía Wikipedia
Inicialmente los Guppy fueron equipados a falta de otra cosa con la pareja WFA/JT, equipos que no podía ser usados a grandes velocidades. Posteriormente fueron reemplazados por QHB o equivalentes como el BQS-2 para la búsqueda activa en domos montados sobre la cubierta y la roda, y BQR-3 en cubierta para seguimiento pasivo de blancos.
Con la disponibilidad del BQR-2B los JT/BQR-3 fueron desmontados. Una vez el BQS-4 fue añadido, los domos de cubierta y roda para BQS-2 y similares desaparecieron igualmente, aunque algunos Guppies mantuvieron algún pequeño domo en cubierta para un teléfono submarino.
En general, hacia 1964 un Guppy II típico estaba equipado con BQR-2B, BQR-3 y BQS-4, junto al sistema Prairie-Masker, el primero para reducir el ruido generado por la maquinaria y hélices y el segundo para silenciar las hélices durante los periodos dando esnorkel.
Para los años 60 estos equipos eran claramente obsolescentes y en 1965 se comenzó un programa para su actualización, basados en el BQR-2E. Sin embargo, el programa fue cancelado en 1967 dada la edad de los buques y su lo próximo de su fecha de baja.
Los equipos defensivos no fueron olvidados y se iniciaron varios programas para dotar a los submarinos de sistemas capaces de detectar e identificar emisiones sonar hostiles emitidas por buques de superficie, submarinos o torpedos. Después de varios problemas de desarrollo se adoptó de forma interina el DUUG-1 Velox francés. Este era un equipo bastante simple que no disponía de capacidad para analizar las señales recibidas y su precisión en demora era limitada, del orden de 20º, ya que sólo empleaba cuatro hidrófonos situados en la vela. Sin embargo, funcionaba bien y prácticamente todos los Guppies recibieron este equipo.
Ya durante la guerra el submarino había demostrado ser una excelente plataforma para tareas de inteligencia, de forma que después de la misma se desarrollaron diversos equipos específicos para la guerra electrónica, desde alertadores radar a complejos equipos ELINT.
Entre los primeros destaca el BLR-1, un sistema ESM montado en el periscopio utilizado para alertar de la presencia de radares hostiles. Debido a ello operaba en las bandas S y X, propias de los radares de exploración y control de tiro navales y aéreos.
Los Guppy también montaron el conocido WLR-1, un equipo ESM que portaron la gran mayoría de los buques de la USN construidos en los años 50 y 60. Era un equipo muy sensible pero poco automatizado, lo que le restaba eficacia y velocidad de respuesta. Solía estar complementado por un WLR-3.
Para la interceptación y localización de las emisiones de radio solían montarse el BRD-6 con el CN-1306 para la escucha de señales interceptadas.
Finalmente, el radar demostró ser un arma muy potente durante la guerra. Su eficacia disminuyó con la generalización de equipos alertadores. Sin embargo, seguía siendo un elemento muy útil y versátil. Las primeras conversiones montaron equipos de la época de la guerra como el SV, aunque posteriormente se generalizó el empleo de modelos más modernos como el SS o el SS-2.
Nuevas armas
La necesidad de equipos de control de tiro más modernos estaba no solo relacionada con el desarrollo de nuevos y mejores sensores, sino con la aparición de nuevas armas más complejas y capaces.
La primera dirección de tiro desarrollada para hacer pleno uso de la nueva generación de armas de postguerra fue la Mk101, una computadora electromecánica dotada de capacidades tales como la entrada automática de datos obtenidos por sonar y calcular las posibles maniobras evasivas que podría ejecutar el blanco. Era un equipo caro y complejo que sólo se montó en buques de nueva construcción y en las conversiones Guppy completas, de forma que el resto fue equipado con una Mk106, que no era más que la TDC Mk4 de la SGM modernizada con elementos de la Mk101. La Mk106 además era lo bastante pequeña como para poder alojarse en la estrecha torre de mando de los Guppy, una reminiscencia de preguerra cuando el submarino se combatía desde la misma en base a las observaciones obtenidas por los periscopios. Inicialmente no estaba capacitada para el empleo de torpedos filoguiados, pero esta opción se añadió posteriormente.
Durante la SGM la USN desarrolló dos torpedos guiados, el Mk27 y el Mk28. Ambos eran de propulsión eléctrica y guía acústica pasiva. El primero era un pequeño torpedo «defensivo» a lanzar desde los tubos traseros contra escoltas y derivado de la exitosa «mina» Mk24. El Mk28 era un torpedo «ofensivo» de mayor tamaño y equipado con una mayor carga explosiva. Si bien estaban optimizados para atacar blancos de superficie, como hemos visto eran capaces de atacar ruidosos submarinos dando esnorkel y sirvieron como base para posteriores desarrollos.

Ilustración 13: torpedo Mark 27 conservado en Manitowoc, WI (warmemorials.us)
Por entonces se lograban los primeros éxitos en el desarrollo de torpedos acústicos activos, siendo el primero en entrar en servicio en gran número el Mk32, un arma limitada que tuvo un breve empleo operativo en la USN aunque sirvió igualmente como base para el desarrollo de armas más evolucionadas.

Ilustración 14: torpedo Mk32 conservado en el Museo Naval de Madrid (autor)
La guía acústica pasiva seguía siendo de interés por su eficacia contra blancos de superficie y continuó su desarrollo.
La nueva «familia» de torpedos de postguerra incluía de nuevo el desarrollo de un torpedo «ofensivo», más grande, pesado y con mayor carga explosiva, y un torpedo «defensivo» a ser lanzado desde los tubos de «contramedidas» (los tubos traseros) contra escoltas o submarinos que estuvieran acosando al buque lanzador. El torpedo «ofensivo» sería el Mk35, mientras que el torpedo «defensivo» evolucionó como Mk37 de manera que este acabó reemplazando al primero.
Mientras la nueva generación de armas era desarrollada era urgente disponer de un arma interina con capacidad ASW. Para ello se desarrolló una nueva versión del Mk27, la Mod4, adaptada a los nuevos sistemas de control de tiro con transmisión eléctrica de datos y capaz de seguir un rumbo determinado controlado por un giroscopio y conectar su buscador pasivo a una distancia segura respecto al buque lanzador. Igualmente fue mejorada su planta propulsora para darle un alcance de 10.000 yardas y una velocidad punta de 18 nudos. Entró en servicio en 1951 y fue reemplazado por el Mk37 a partir de 1960. Destacar que un cierto número de estas armas fue transferida a la Armada Española y fue el primer torpedo ASW de lanzamiento submarino empleado por nuestra armada.
El Mk35 fue diseñado como torpedo activo/pasivo universal, para uso desde submarinos y buques de superficie, aunque su tamaño final, con 533mm de diámetro y casi 800kg de peso excluyó el vector aéreo. Pese a haber suspendido su evaluación previa, comenzó a ser producido en serie en 1949 con un buscador de nuevo diseño. Un total de 400 unidades fueron construidas hasta 1952 y estuvo en servicio hasta 1960 a bordo de destructores y submarinos cuando fue reemplazado por el Mk37.
Una versión aligerada y de menor tamaño, denominada Mk41, fue diseñada para permitir su lanzamiento aéreo. Sin embargo, para cuando estuvo lista fue cancelada a favor del Mk43, dinámicamente comprometido pero compatible con su uso desde helicóptero, unas máquinas muy limitadas entonces pero con un enorme potencial que la USN supo reconocer.
El desarrollo del Mk37 se inició en 1946 de manera paralela al Mk35 como pequeña arma de tipo defensivo. Sin embargo, pronto desplazó al Mk35 gracias a su buscador activo/pasivo de diseño más moderno y sus prestaciones, con un alcance 10.000yds a 26 nudos o 23.500 yardas a 17,5 nudos. Sin embargo, era muy lento para atacar buques de superficie rápidos y por ello se decidió mantener al torpedo convencional de carrera recta Mk14 como complemento.
El Mk37 difícilmente podía explotar su alcance máximo debido a las limitaciones de su sistema de guía. Seguía un rumbo inicial calculado mediante un giroscopio a baja velocidad para permitir a su buscador pasivo detectar el blanco; una vez este era enganchado pasaba a emitir en modo activo y aceleraba. Sin embargo, durante su navegación de crucero las maniobras del blanco podían poner a este fuera del alcance de su buscador.
La solución fue el desarrollo de la guía por cable, otra idea alemana que no llegó a ser perfeccionada durante la guerra. De nuevo, el primer torpedo filoguiado usado de forma operacional fue un desarrollo del Mk27 conocido como Mk39, aunque su vida operativa fue corta (de 1956 a 1960) ya que se usó fundamentalmente para familiarizar a las tripulaciones con este tipo de armas. Finalmente una versión guiada por cable del Mk37 entró en servicio como Mk37Mod1, algo más pesado y lento. Fue modernizado como Mod2 (el Mod0 modernizado pasó a ser el Mod3) y permaneció en servicio con la USN hasta 1985.
El Mk37 demostró ser un diseño muy adaptable y de gran difusión. Pese a ser reemplazado en los EEUU por el Mk48, Raytheon continuó su desarrollo produciendo versiones modernizadas equipadas con un motor térmico bajo la denominación NT-37. El fabricante producía kits que podían ser instalados por el propio cliente, mejorando el alcance, velocidad y prestaciones acústicas del arma original. Fue adoptado por varias marinas como armas remanufacturas o de nueva producción incluyendo por algunos de los usuarios de submarinos GUPPY de exportación. Por ejemplo, Perú armó a sus GUPPY con la versión NT-37C.

Ilustración 15: Cargando un torpedo Mk 37 a bordo del buque museo USS Torsk (SS-423) en 2002 (usstorsk.org)
Si bien el Mk37 era un arma satisfactoria para enfrentarse a submarinos convencionales diesel-eléctricos, su velocidad era insuficiente para enfrentarse a los rápidos submarinos nucleares. El desarrollo de un nuevo torpedo rápido llevó a la aparición del ya mencionado Mk48, muy superior en todos los aspectos al Mk37.
No podemos dejar de citar al Mk 45 ASTOR (AntiSubmarine TORpedo), un torpedo de 484mm de diámetro y 40 nudos de velocidad armado con una cabeza nuclear W34 de 20kt, guiado por cable y detonado a distancia, careciendo incluso de espoletado independiente. Fue desarrollado para suplir las deficiencias del Mk37Mod1, cuya velocidad de sólo 14,7 nudos bajo guía por cable era insuficiente para poder empeñar a la nueva generación de submarinos de propulsión nuclear desarrollados por la URSS. Además, su cabeza nuclear le permitiría destruir de un solo golpe hasta el más resistente blanco submarino. Entró en servicio a principios de los 60 y fue usado sólo en los Guppy III dado que su empleo estaba ligado al del PUFFS para lograr datos de demora y distancia exactos de forma pasiva. Fue dado de baja tras la introducción del torpedo pesado Mk48 poco después de la baja del último GUPPY de la US Navy.

Ilustración 16: Mark 45 ASTOR por Cliff – originally posted to Flickr as Mark 45 Nuclear Torpedo. Licencia CC BY 2.0, via Wikimedia Commons. El tubo dispensador de cable se encuentra debajo de las hélices propulsoras

Pingback: El treinta y único | En Visita de Cortesía·
Pingback: Cuando el Cosme García (S-33) fue el primer submarino “nuclear” de la Armada | Foro Naval·
Pingback: Cuando el Cosme García (S-34) fue el primer submarino “nuclear” de la Armada | Foro Naval·